本件ではopenFrameworksとReactを使い、パン・チルト機構の位置と角度を調節、シーケンシャルに動作するシステムを開発しました。
要件
ボールを反射させる反射板の位置と角度をシーケンシャルに動かして、目的の位置へ飛ばすための装置の制御が必要とされました。
板から板へ連続して飛び跳ねるなどのアクロバティックな動作を実現するため、0.1度単位の細かな角度の調整が必要でした。
開発フェーズ
モーターにDynamixelモーターとオリエンタルモーターのAZシリーズが採用されています。
DynamixelについてはC++のライブラリが提供されていたため、モーターの制御やシーケンシャルな動作の再生機能を持ったソフトウェアの開発にopenFrameworksを採用しました。
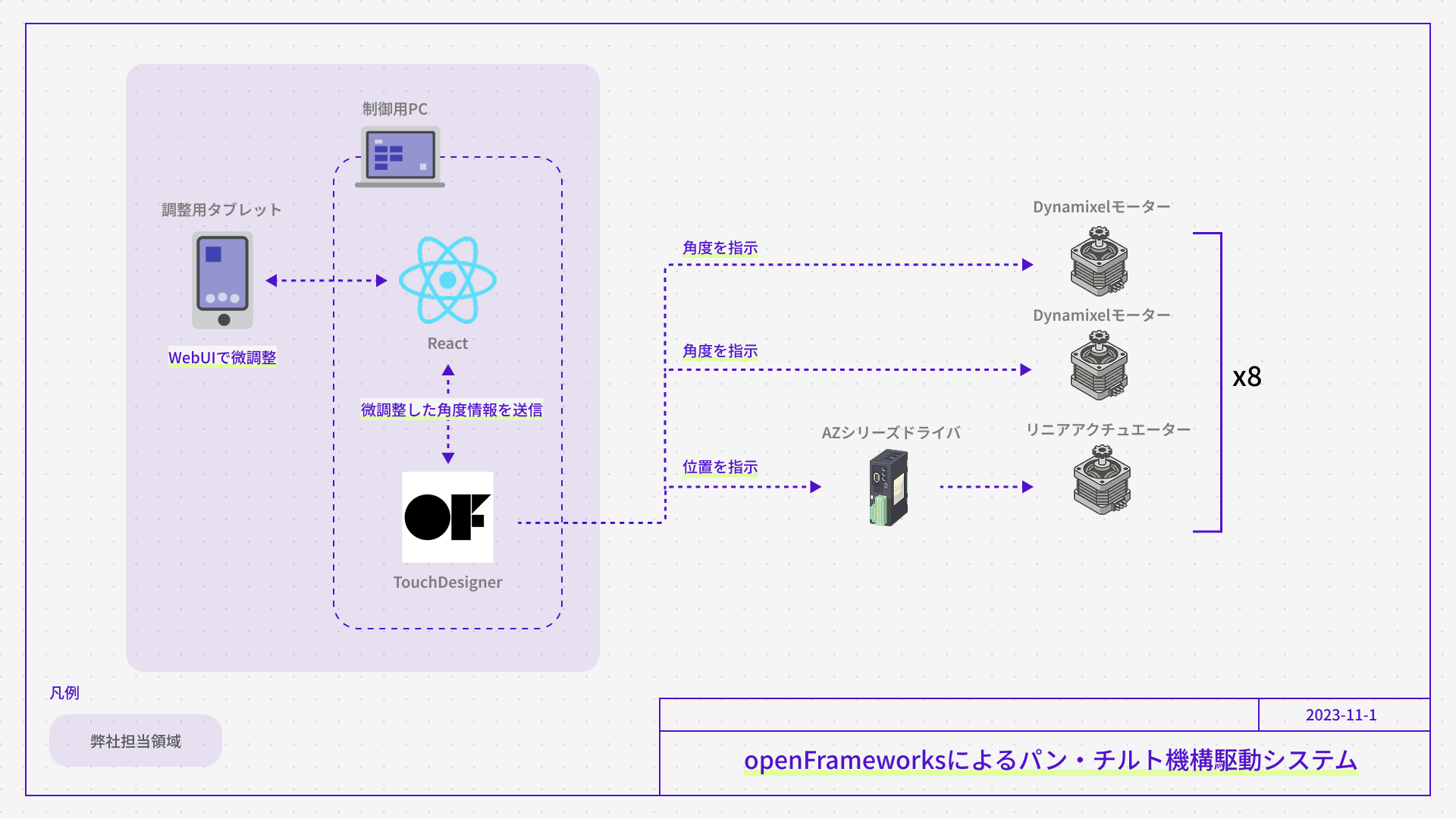 また、装置の近くで状況を詳しく見ながら細かく角度調整を行う必要がある、という状況になったため途中でReactを使ったWebアプリケーションを開発し、タブレット上でWi-Fiを経由して角度の微調整を行えるようにしました。
また、装置の近くで状況を詳しく見ながら細かく角度調整を行う必要がある、という状況になったため途中でReactを使ったWebアプリケーションを開発し、タブレット上でWi-Fiを経由して角度の微調整を行えるようにしました。
クリエーション・現場調整
ReactのWebアプリケーションを用意したことで、スタジオでの映像撮影という限られた時間の中で装置の調整を行うことができました。
また、C++ベースのopenFrameworksを使うことで公式のモーターライブラリとタイムラインベースの指示をシームレスに繋ぐことができました。